




현재 위치 :카지노 게임항공전자유한공사에볼루션 카지노 제53연구소더킹 카지노 제53연구소




미래 전장의 새로운 정상 : 인간의 인간/플러스 카지노 플러스 카지노 협력
초록 :2"의 전투 효과가 달성됩니다. 이 기사는 최근 몇 년간 유인/플러스 카지노 협업 분야에서 미군 프로젝트에 대한 심층적 인 분석을 수행하고, 유인/플러스 카지노 협업에 의해 개발되어야하는 주요 기술을 요약하고, 전형적인 전투 시나리오와 전투 프로세스를 연구하고, 유인/플러스 카지노/플러스 카지노 운영의 미래의 콜라 모니터 운영에 대한 제안을 제안합니다. 협업 운영.
키워드 :유인/무인 협력; UAV
소개
2"의 효과를 형성 할 수 있습니다. 유인 항공기와 플러스 카지노은 공기 중 통제와 통제 사이의 장기적인 관계를 유지할 것입니다 [1]. 무인 지능 수준의 지속적인 개발로 인해 유인 항공기 및 플러스 카지노의 스타일, 조정 된 형태 및 관련 기술도 지속적으로 발전하고 있습니다. 따라서 전투 효율성을 향상시키기 위해 유인/플러스 카지노 협업 구성을 개발하는 것이이 단계에서 현명한 선택입니다.
이 기사는 주로 유인/플러스 카지노 협력 분야에서 미군의 프로젝트와 기술 혁신을 연구하고 미래의 유인/플러스 카지노의 발전에 대한 생각을 제공합니다. 이 기사의 조직 구조는 다음과 같습니다. 1 장에서는 최근 몇 년간 유인/무인 항공기의 방향으로 미군의 전형적인 프로젝트에 중점을 둡니다. 2 장에서 주로 유인/무인 항공기의 주요 기술을 소개합니다. 3 장은 유인/무인 항공 차량의 전형적인 전투 시나리오 및 시나리오 모델입니다. 4 장은 유인/무인 항공기의 미래 개발 방향에 대한 전망입니다. 마지막 으로이 기사는 요약되어 있습니다.
1 미군에서 유인 및 플러스 카지노의 공동 작업 개발 상황에 대한 분석
미군은 인간/무인 조정을 "세 번째 오프셋 전략"의 5 가지 주요 기술 영역 중 하나로 나열합니다. 개인 및 노동 조합 협력의 개념은 1960 년대에 처음 등장했으며, 플랫폼 상호 운용성과 공유 자산 제어를 설명하는 데 사용되는 공통의 전투 미션 목표를 달성하기 위해 사람과 운영 시스템 간의 연결을 확립하는 것을 언급했습니다. 최근 DARPA와 다양한 군사 서비스는 유인/플러스 카지노 협업 분야에서 많은 연구 작업을 수행했으며, 주로 건축, 명령 및 제어, 커뮤니케이션 네트워킹 및 휴먼 컴퓨터 상호 작용의 네 가지 측면에서 개발에 중점을 둡니다.
1.1 아키텍처
DARPA는 2014 년에 미국의 우월성을 보장 할 수있는 새로운 방법을 탐색하기 위해 시스템 통합 기술 및 실험 (SOSITE) 프로젝트 발표를 발표했습니다.이 프로젝트의 목표는 여러 인간 및 무인 플랫폼에서 단일 무기 시스템의 능력을 분산시키는 것입니다. 기능, 시스템 또는 시스템. Sosite Project는 개방형 시스템 아키텍처 방법을 사용하여 원활하게 설치하고 사용 가능하며 최신 업그레이드를 신속하게 완료 할 수있는 교환 가능한 모듈 및 플랫폼을 개발하여 새로운 기술의 통합 및 통합을보다 쉽고 빠르게 할 수 있습니다. 그림 1에서 볼 수 있듯이 전자 전쟁, 센서, 무기 시스템, 전투 관리, 포지셔닝 내비게이션 및 타이밍 및 데이터/통신 체인을 포함한 개방형 시스템 아키텍처 방법을 통해 다양한 유인 및 무인 플랫폼 간의 공기 플랫폼의 주요 기능 할당.

그림 1 소사이트 개념 다이어그램
2017 년, 소스 사이트 분산 개발이라는 아이디어를 바탕으로 미군은 "모자이크 전쟁"이라는 개념을 추가로 제안하고 플랫폼과 주요 하위 시스템의 통합에서 전투 네트워크의 연결, 명령 및 제어에 이르기까지 다양한 플랫폼 간의 동적 협업을 강조했습니다. 다양한 센서, 명령 및 제어 시스템, 무기 시스템 등을 "모자이크 조각"과 비교함으로써 다양한 조각이 통신 네트워크를 통해 힌지되어 유연하고 기동성있는 전투 시스템을 형성하여 기존 장비 및 장기 개발 사이클의 높은 연구 및 개발 및 유지 보수 문제를 해결합니다.
1.2 명령 및 통제
유인/무인 항공기의 조정 된 명령 및 통제를 고려하여, 미군은 유인 및 플러스 카지노이 강력한 대립/간섭 환경에서 공동 작업을 수행하여 분산 된 고발 관리 능력을 형성하는 방법을 연구하는 데 중점을 둡니다.
2014 년 DARPA는 "환경에서 조정 된 운영"(코드) 프로젝트를 제안했습니다. "코드"의 목표는 "코드"소프트웨어가 장착 된 플러스 카지노이 유인 플랫폼에서 미션 사령관의 전체 감독하에 확립 된 참여 규칙에 따라 목적지로 이동할 수 있도록하는 것입니다. 이 코드 프로젝트는 고급 알고리즘과 소프트웨어를 개발하여 분산 전투에서 플러스 카지노의 자율적이고 협력적인 기술을 탐구하고, 미군의 기존 플러스 카지노 시스템의 기능을 확장하여 지상과 해상에서 고도의 대상을 가진 역동적 인 장거리 전투 전투 공간에 참여합니다.
코드 프로젝트는 3 단계로 나뉩니다.
시스템 분석, 아키텍처 설계 및 주요 기술의 개발, 시스템 요구 사항 완료 및 예비 시스템 설계를 포함한 2014 년부터 2016 년 초까지의 첫 번째 단계.
2016 년 초부터 2017 년 중반까지 두 번째 단계 인 Lockheed Martial Arts와 Raytheon은 RQ-23 "Tiger Shark"플러스 카지노을 관련 소프트웨어 및 하드웨어를 설치하는 테스트 플랫폼으로 사용했으며 개발 아키텍처, 독립적 인 협력 계획과 같은 지표를 확인하기 위해 많은 수의 비행 테스트를 수행했습니다.
세 번째 단계는 2018 년 1 월에 시작하여 6 개의 실제 플러스 카지노과 시뮬레이션 항공기의 협업 기능을 테스트하여 복잡한 작업을 완료하기 위해 플러스 카지노 팀의 단독 명령을 달성합니다.
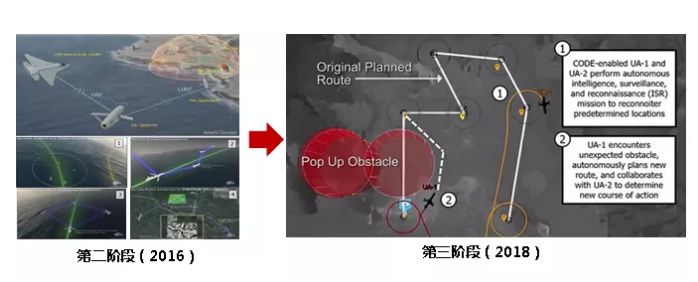
그림 2 "거부 환경에서 조정 된 작업"프로젝트
2014 년 DARPA는 "Dippleed Battlefield Management (DBM) 프로젝트를 제안했습니다. 프로젝트 배경은 미래의 대립 공역입니다. 협력 항공기는 상대방의 발견을 피하거나 상대방이 방해하고 정보를 교환 할 수 없도록 통신을 제한해야 할 수도 있습니다. 이것은 유인/무인 조성의 전투 능력에 심각한 영향을 미칩니다. 이러한 이유로, DBM 프로젝트의 목표는 전투 형성이 혼란 스러울 때에도 작업을 계속 수행 할 수 있도록하는 것입니다.
- 첫 번째 단계는 2014 년에 시작되었습니다. 고급 알고리즘 및 소프트웨어를 개발함으로써 분산 공기 전투 임무에 대한 적응 계획 및 상황 인식을 향상시키고, 조종사가 강력한 대결 환경에서 복잡한 전투 작업을 더 잘 수행하기 위해 전장 관리 작업을 수행하는 데 도움이 될 것입니다.
- 2016 년 5 월, DARPA는 Lockheed Martin에게 1,620 만 달러의 프로젝트 II 계약을 수여하여 유인 및 플러스 카지노과 관련된 복잡한 항공 전투를 계획하는 데 도움이되는 완전히 기능적인 의사 결정 보조 소프트웨어 프로토 타입을 설계했습니다.
- 2018 년 1 월, DARPA는 BAE Systems에 DBM 프로젝트에 대한 3 단계 계약을 수여했습니다. 처음 두 단계의 개발 단계의 결과는 유인/플러스 카지노 마샬링이 간섭 환경에서 비행 할 수 있으며 위협을 피하고 공격 목표를 피할 수있는 능력을 가질 수 있습니다. 그림 3은 DBM 프로젝트의 기능 검증 환경입니다.
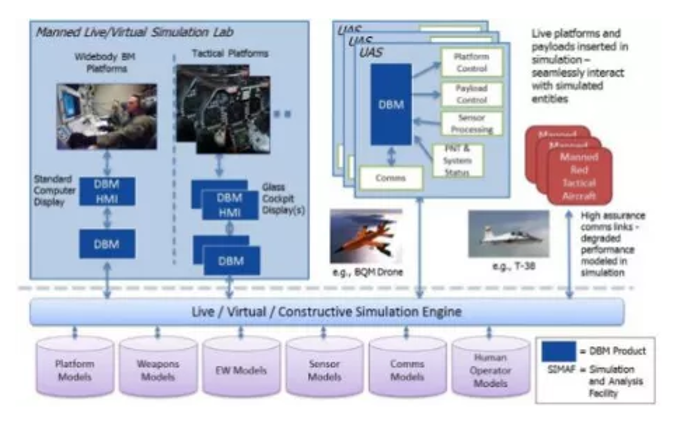
그림 3 "분산 운영 관리"기능 검증 환경
1.3 통신 네트워킹
유인 플랫폼과 무인 플랫폼은 통신 네트워크를 통해 연결되어 있으며 휴먼/플러스 카지노 협업 기능의 형성은 플랫폼 간의 상호 연결을 기반으로합니다. 한편으로, 협업 작업은 대역폭, 지연, 간섭 방지/손상, 낮은 탐지 및 기타 통신 네트워크의 성능에 대한 새로운 요구 사항을 제시합니다. 반면, 통신 네트워킹은 전통적인 플랫폼의 이기종 네트워크와 향후 새롭고 향상된 네트워크에 적응할 수 있어야합니다.
"C2E (Communication in the Communication in the Communication) 프로젝트"중간 플랫폼 간의 통신 능력 "(C2E) 프로젝트는 동일한 무선 주파수와 파형을 사용하여 항공기 간의 무제한 통신을 보장하여 간섭 방지, 탐지하기 어려운 통신 네트워크 기술을 개발하여 다양한 스펙트럼 전쟁 위협을 처리합니다.
DARPA는 2015 년 "Mission Optimization을 충족시키는 Dynamo Adaptation Network"(Mission Optimization을 충족시키는 Dynamo Adaptation Network”(Dynamo Adaptation Network”(Dynamo) 프로젝트를 발표했습니다. 네트워크 동적 적응 기술을 개발함으로써 다양한 항공 플랫폼은 활성 간섭에 직면 할 때 특정 보안 수준에서 즉각적인 고속 통신을 수행 할 수 있습니다. C2E 프로젝트의 하드웨어 결과는 프로젝트의 데모 및 검증에 사용되며, 원래 RF 데이터가 현재 호환되지 않는 공기 기반 네트워크간에 통신하여 유인/무인 공중 차량 협업 시스템의 이질적인 플랫폼간에 실시간 데이터 공유를위한 토대를 마련합니다.
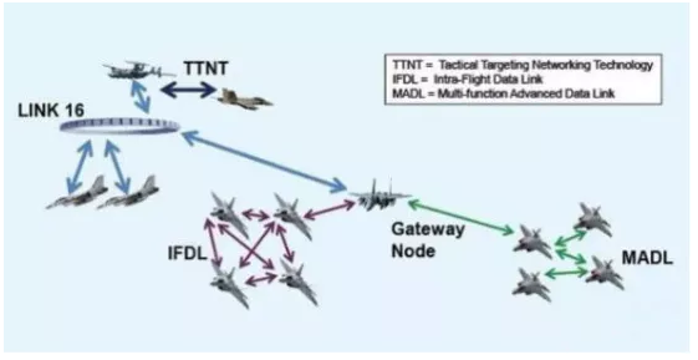
그림 4 미군의 기존 주요 항공 기반 네트워크의 회로도
1.4 인간 컴퓨터 상호 작용
코드 및 기타 프로젝트는 인공/플러스 카지노 협업과 인간 컴퓨터 상호 작용에서 많은 작업을 수행했습니다. 또한 미 육군은 2017 년에 "SCORCH"시스템에는 "SCORCH"시스템에는 "SCORCH"시스템에는 Drone의 지능형 자율 학습 행동 소프트웨어 및 고급 사용자 통합 기능을 포함하여 인간의 상호 작용 분야에 최신 기술을 통합하여 인간의 인식 및 고유 한 시스템을 통합하는 고급 사용자 인터페이스의 지능형 자율 학습 행동 소프트웨어를 포함하여 2017 년에 "UAV 운영을위한 최상의 역할 할당 관리 제어 시스템 (SCORCH)의 개발을 완료했습니다. 시스템 인터페이스는 터치 스크린 상호 작용이 장착 된 유리 조종석, 전용 터치 디스플레이가 장착 된 모바일 게임 수동 컨트롤러, 보조 대상 인식 시스템 및 기타 고급 기능을 갖춘 다중 플러스 카지노 컨트롤에 최적화됩니다. "Scorch"는 여러 플러스 카지노의 미션 할당을 담당하며 항공 미션 사령관이 중요한 결정 지점에 도달 할 때 Air Mission Commander에게 경고하여 단일 운영자가 3 개의 플러스 카지노 시스템을 동시에 효과적으로 제어하고 다시 보내는 실시간 이미지를 탐색 할 수 있습니다.
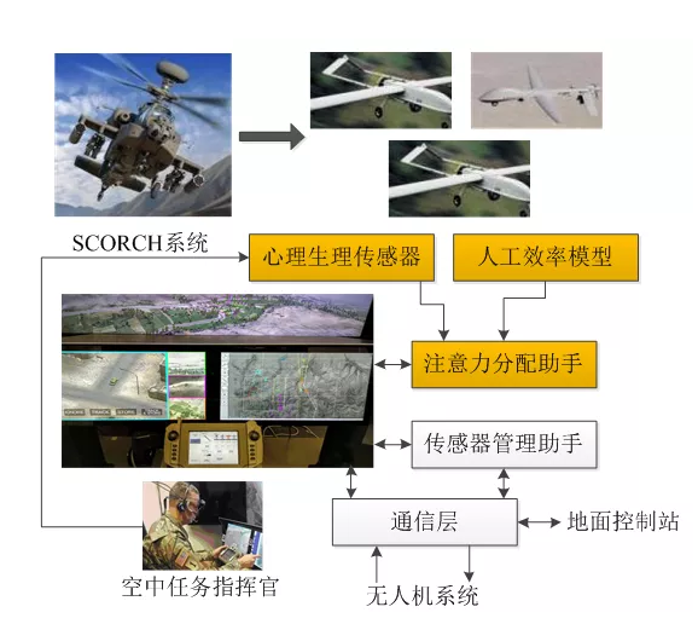
그림 5 플러스 카지노 운영을위한 최상의 역할 할당 관리 제어 시스템
2 유인/플러스 카지노 협업의 주요 기술 분석
2.1 오픈 시스템 아키텍처 기술
유인/UAV 협업에는 여러 전투 플랫폼이 포함됩니다. 다른 전투 플랫폼에서 큰 차이가있는 기술 시스템이 채택되면 시스템 통합의 어려움이 크게 증가합니다. 개방형 시스템 아키텍처는이 문제를 해결하도록 설계되어 획득 및 비즈니스 모델을 전통적인 굴뚝 개발 모델에서 멀어지게하고 휴대 성, 모듈성, 디커플링, 쉬운 업그레이드 및 확장 성이있어 수명주기 비용을 줄이고 배포 시간을 단축 할 수 있으며 산업 및 방어부의 지원을 받았습니다.
현재, 미군의 대표적인 오픈 시스템 아키텍처에는 미래의 공중 역량 환경 (FACE) 및 OMS (Open Mission Systems)가 포함됩니다.
2.1.1 미래의 항공 능력 환경
미 해군은 공중 전자 시스템에서 소프트웨어의 이식 및 배치를 지원하기 위해 공공 운영 환경을 구축하기 위해 미래의 공중 역량 환경의 개념을 제안했습니다. 이 아이디어는 모바일 장치에서 공공 운영 환경을 사용하는 이점에서 영감을 얻었습니다. Face는 공개 아키텍처, 통합 모듈 식 항공 전자 시스템 및 모듈 식 개방 시스템 분석 방법을 채택하고, 개방형 구조를 채택하고, 개방형 구조를 채택하고, 공개 표준을 엄격하게 개발하여 항공 전자 시스템 내 응용 프로그램 간의 상호 운용성을 극대화합니다.
미래의 Airborne Capacity Environment (Face Alliance)는 2010 년에 모든 군용 항공 플랫폼 유형에 대한 개방형 항공 전자 환경을 정의하기 위해 설립되었습니다. Face Technical Standard는 안전 크리티컬 컴퓨팅 작업을보다 강력하고 상호 운용 가능하며 휴대용 및 안전하게 만드는 개방형 실시간 표준입니다. 표준의 최신 버전 (2017 년 릴리스 3.0)은 애플리케이션 상호 운용성 및 이식성을 더욱 향상시키고 공식적으로 지정된 데이터 모델을 포함하여 얼굴 구성 요소 간 데이터 교환 요구 사항을 향상 시키며 표준 정의를위한 일반적인 언어 요구 사항을 강조합니다. 표준 인터페이스를 사용 하여이 개방 표준을 사용하면 시스템과 구성 요소 간의 상호 운용성이 가능하며 인터페이스 재사용이 가능합니다. 그림 6은 휴대용 구성 요소 단위, 전송 서비스 장치, 플랫폼 별 서비스 장치, 입력 및 출력 서비스 장치 및 운영 시스템 장치로 나뉘어 진 얼굴의 소프트웨어 아키텍처입니다.
항공 전자 시스템에서 개방 표준 사용의 표준화는 다음과 같은 이점이 있습니다. (1) 페이스 시스템 개발 및 구현 비용 절감 (2) 표준 인터페이스를 사용한 기능 재사용 (3) 여러 얼굴 시스템 및 공급 업체에서 응용 프로그램의 휴대 성 (4) 얼굴 표준 준수 제품의 조달.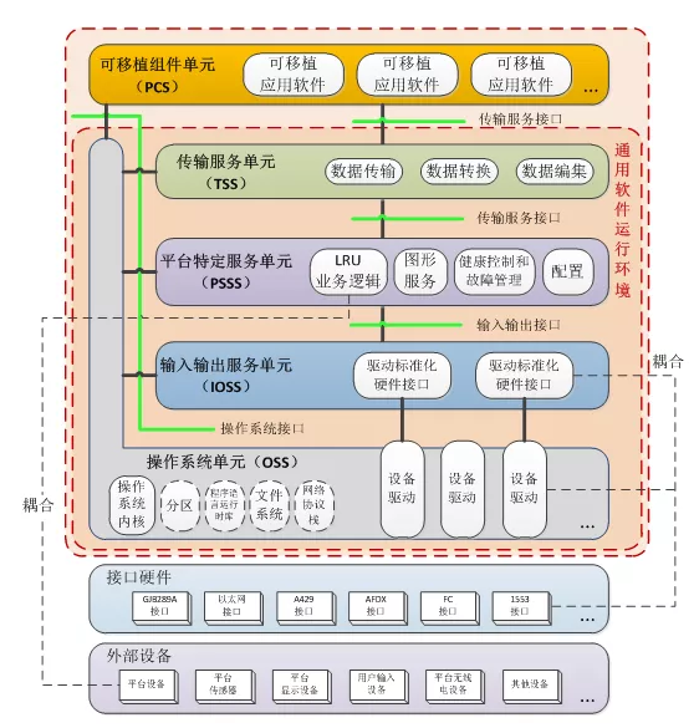
그림 6 얼굴 아키텍처
2.1.2 오픈 작업 시스템
미국 공군은 비 독점 오픈 시스템 아키텍처를 개발하기 위해 오픈 미션 시스템 프로그램을 시작했습니다. 정부, 산업 및 학계의 회원으로 구성된 OMS 프로그램은 UAS (UAV Systems) 명령 및 제어 프로그램 (UCI) 및 유니버설 미션 컨트롤 센터 (CMCC)뿐만 아니라 여러 항공 플랫폼 및 센서 획득 절차를 포함한 신흥 OMS 표준의 개발을 적극적으로 조정하고 있습니다.
OMS 및 기타 OSA 작업의 목표는 개발 및 수명주기 비용을 줄이기위한 새로운 조달 및 아키텍처 방법을 식별하는 동시에 시스템 기능을 업그레이드하고 확장하는 실용적인 방법을 제공하는 것입니다. 미국 공군이 개발 한 OMS (Open Mission System) 표준은 상업 개발 및 미들웨어에 서비스 지향 아키텍처 (SOA)의 개념을 활용합니다. 공군은 항공 전자 시스템의 빠른 개발을 촉진하기 위해 OMS 표준의 기능을 확장하려고합니다. UCS OMS 참조 아키텍처는 주요 인터페이스 및 모듈뿐만 아니라 기본 서비스 지향 설계 패턴 및 원리를 설정합니다. 항공 전자 시스템의 기능은 일련의 서비스 및 고객 세트로 특징 지어집니다. 경우에 따라 프로그램 또는 시스템은 클라이언트 및 서비스 일 수 있습니다. OMS 표준은 클라이언트 및 서비스의 기본 동작과 시스템을 입력하고 종료하는 데 사용되는 ASB (Avionics Service Bus) 프로토콜을 정의하여 테스트, 결함 허용, 격리 및 인증을 지원합니다.
Sosite 프로젝트의 최신 시험에서, 소위 "아인슈타인 박스"인 복잡한 조직 개방형 시스템 아키텍처 (E-OSA) 작업 컴퓨터 버전 2 (EMC2)는 그림 7과 같이 사용되었습니다. Lockheed Martin이 개발 한 E-OSA는 미국 공군 OMS 표준과 호환됩니다. "아인슈타인 박스"는 시스템 간의 통신을위한 보안 보호를 제공 할 수 있으며, 관련 기능을 운영 체제에 배포하기 전에 "아인슈타인 박스"는 빠르고 안전한 실험을 보장 할 수 있습니다. "아인슈타인 박스"는 커뮤니케이션 게이트웨이 일뿐 만 아니라 스마트 폰과 비교할 수 있으며 다양한 응용 프로그램을 실행할 수 있으며 동적 미션 계획, ISR 및 전자 전쟁을 구현할 수 있습니다.
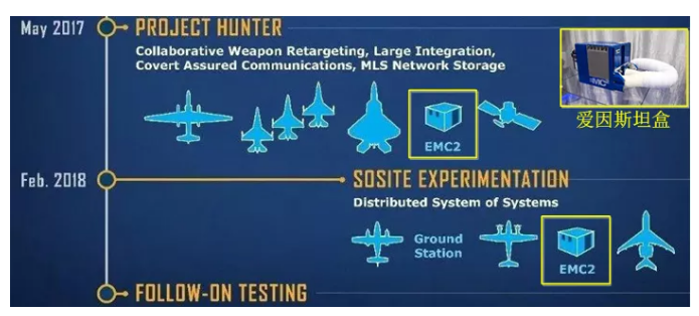
그림 7 EMC2를 사용한 미군 시험
2.2 UAV 통제 권한의 핸드 오버
다른 플러스 카지노 제어 권한의 전송 프로세스 및 핸드 오버 지침은 크게 다릅니다. STANAG 4586 General Control Standard는 현재 플러스 카지노 제어 권한의 핸드 오버에 대한 지침을 다루지 않습니다. 현재 플러스 카지노 제어 권한의 핸드 오버에 대한 통합 표준이 부족하다 [4,5]. UAV 통제 기관 핸드 오버 지침은 주로 다음과 같이 나뉩니다. 응용 프로그램 기관 요청, 릴리스 기관 요청, 권한 요청, 동의, 동의 및 확인 등
유인/UAV 조정 전투는 대략 두 가지 모드로 나눌 수 있습니다. 공기 지상 핸드 오버와 제어 핸드 오버의 공기 방송 핸드 오버. 공기 중에 다른 유인 항공기 플랫폼 간의 플러스 카지노 제어 당국의 이전은 주로 유인 항공기가 유인/플러스 카지노 협업 전투 시스템에 합류하여 종료 할 때 발생합니다. 유인 항공기가 공중으로 돌아 오거나 적에게 맞아야한다면 플러스 카지노 제어 당국은 다른 유인 항공기로 넘겨야합니다. 유인 항공기와 지상 통제 스테이션 간의 플러스 카지노 제어 당국의 핸드 오버는 주로 작업이 완료되기 전후에 발생합니다. 플러스 카지노은 이륙하고 착륙 프로세스는 지상 제어 스테이션을 기본 컨트롤러로 요구합니다. 또한 플러스 카지노에서 비정상적인 상황이 발생하고 유인 항공기가 제 시간에 작동하지 않으면 플러스 카지노 제어 기관도 지상 통제 스테이션으로 넘겨야합니다.
2.3 공동 작업 할당 및 지능형 경로 계획
작업 자체 계획의 요구 사항과 특성을 고려하여, 자체 조정, 타겟 자기 위치 및 기타 요구 사항 및 기타 요구 사항 및 특성을 고려하여/미지급 플랫폼의 조정 된 전투 임무 중 [6], 전술 중심의 자동 분해 및 역할 자율적 할당 기술의 조정 된 전투 임무 중에 전술 중심의 자동 작업 해결 및 Manned Machines 및 Manned Platform Machines 및 Manned Platform Machines 및 Manned Platform Machines 및 Manned Platform Role 및 Manned Platform rolate에 대한 강력한 실시간 전술 중심의 자동 작업 해결 및 지능형 Allocation을 수행하는 데 사용됩니다. 유인 운영자가 최상의 솔루션을 선택할 수 있도록 보조 의사 결정 지원을 제공하기위한 실현 가능한 작업 계획 솔루션.
그림 8에서 볼 수 있듯이 유인/무인 공동 작업 경로 임시 계획 기술을 사용하여 경로는 전장 환경, 전투 상황 및 플랫폼 상태를 기반으로 자동 계산 및 최적화되어 다양한 경로 계획 솔루션을 제공합니다. 과제 자율 배분 전략 및 보조 의사 결정 지식 기반을 설정하고, 자체 계획 및 적응 형 비행 제어 전략 및 보조 의사 결정 지식 기반을 노출시키고,/무인 구성과의 협업 전투의 자율 계획 기능을 향상시킵니다.
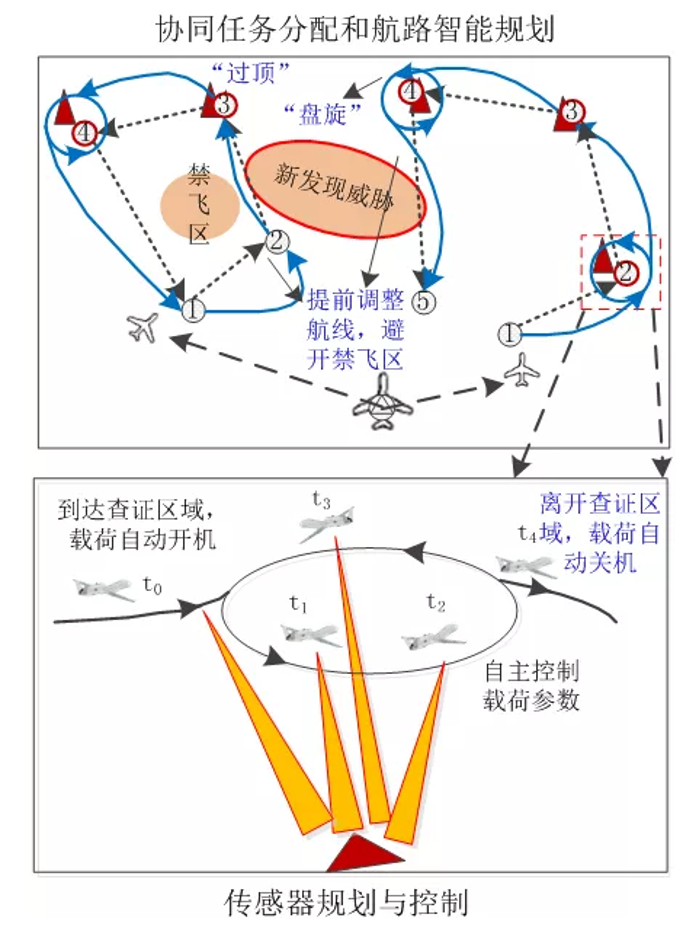
그림 8 조정 된 작업 할당 및 지능형 내비게이션 계획
2.4 포괄적 인 식별 및 인텔리전스 퓨전
다양한 유인/무인 협동 조합 전투 임무의 경우, 유인 및 무인 항공기가 운반하는 부하의 유형은 특히 플러스 카지노이 운반 할 수있는 부하의 유형은 크게 다양합니다. 특히 플러스 카지노, 가시 광선, 적외선, 다중 스펙트럼/과기 스펙트럼, 전자 정찰 등이 포함됩니다. 플러스 카지노은 다중 유형의 지불로드를 동일하게 통과합니다. 다중 소스 인텔리전스 데이터. 장거리 목표 인식에 대한 신뢰를 향상시키고, 상황 인식을 향상시키고, 목표 탐지를 개선하며, 정확한 위치를 향상 시키며, 생존 가능성을 향상 시키며, 다양한 플랫폼에 대한 멀티 모달 센서 정보의 포괄적 인 식별 및 통합은 인간/무수병 콜라보레이션을위한 주요 기술 중 하나가 될 것입니다. 현재, 심층 신경망은 이미지/비디오 객체 감지 및 인식 분야에서 광범위한 응용 프로그램을 달성했으며 전통적인 방법에 비해 명백한 이점이 있습니다. 인공 지능 기술의 도움으로 다중 소스 인텔리전스 데이터의 포괄적 인 식별 및 인텔리전스 통합을 통해 전장에 대한 통일 된 상황 정보가 형성되어 의사 결정 프로세스에 빠르고 정확하며 신뢰할 수있는 기초를 제공합니다.
3 전형적인 전투 시나리오 및 전투 프로세스
예를 들어 에어 초기 경고 항공기를 예로 들어 보면 다음은 유인/무인 조정 전투의 전형적인 전투 시나리오에 대한 소개입니다. 도 9에 도시 된 바와 같이, 초기 경고 항공기는 유인/무인 조형의 명령 제어 및지도를 실현한다. 초기 경고 항공기는 포괄적 인 정보 처리, 공동 형성의 전술적 의사 결정, 미션 관리 및 플러스 카지노의 명령 및 통제를 완료하고 플러스 카지노은 자율 비행 제어, 전장 상황 인식 및 항공/지상/해상 목표에 대한 최종 파업을 완료합니다 [7]. 유인 전투기 제트기는 시스템에서 통신 노드 역할을하며, 유인/무인 전투 형성을 전체 대립 시스템에 포함시켜 전장에 대한 정보 공유, 가용 자원의 통합 된 일정 및 전투 작업의 포괄적 인 관리를 실현합니다.
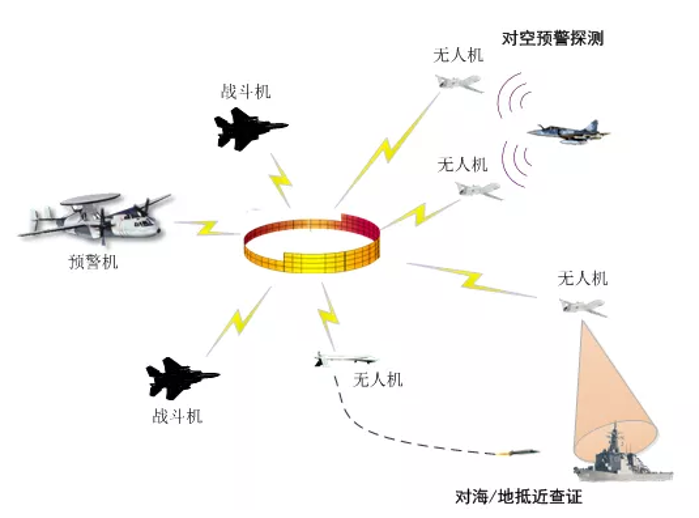
그림 9 유인/플러스 카지노 협업을위한 전형적인 전투 시나리오
유인/플러스 카지노 협업 전투의 전형적인 전투 과정은 그림 10에 나와 있으며 작업 준비 단계, 작업 실행 단계 및 작업 종료 단계로 나뉩니다.
(1) 작업 준비 단계.
유인과 플러스 카지노의 완전한 임무/웨이 구속력. 유인 항공기와 플러스 카지노은 별도로 이륙하여 핸드 오버 지역으로 날아 갔다. 플러스 카지노 지상 통제 스테이션 (Drone Ground Control Station)은 유인 항공기로 플러스 카지노의 통제 당국을 넘겨 주었고 유인 항공기의 지휘하에 그들은 사명 지역으로 날아 갔다.
(2) 작업 실행 단계.
유인 항공기는 현재 전장 상황 정보를 기반으로 각 플러스 카지노의 전투 임무를 할당하고 플러스 카지노의 경로와 센서를 계획합니다. 유인 항공기의 지휘하에 플러스 카지노은 계획 결과에 따라 비행 임무를 수행합니다. 대상 영역에 도착하면 센서가 켜집니다. 유인 항공기의 운영자는 플러스 카지노 센서를 제어하며 플러스 카지노은 대상 지능을 유인 항공기로 수집하고 반환해야합니다. 다중 소스 인텔리전스의 포괄적 인 처리를 통해 새로운 상황 정보가 유인 및 기계의 추가 의사 결정의 기초를 제공하기 위해 형성됩니다.
(3) 작업 종료 단계.
미션이 완료된 후 유인 항공기는 플러스 카지노에게 핸드 오버 지역에 도착하도록 명령하고 유인 항공기는 플러스 카지노의 통제 권한을 플러스 카지노의 지상 통제 스테이션으로 전송합니다. 유인 및 플러스 카지노은 각각의 임무를 수행하거나 반환 항공편을 수행합니다.
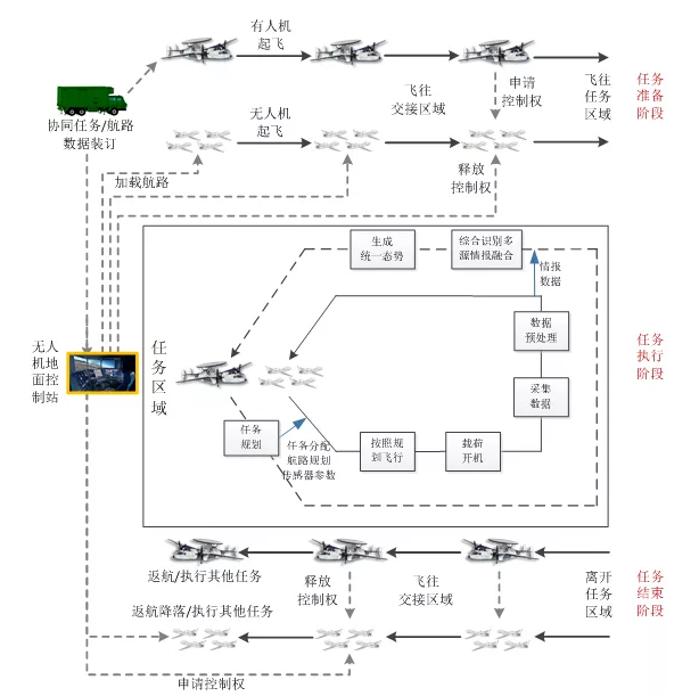
그림 10 유인/플러스 카지노 협업을위한 전형적인 전투 프로세스
4. 인간화/플러스 카지노 협업 분야의 개발에 대한 전망
유인/UAV 협업 운영은 미래의 중요한 개발 방향입니다. 현재 미군의 유인/무인 협업 프로젝트 및 주요 기술에 대한 분석 및 이해를 바탕 으로이 분야는 향후 다음 방향으로 점차 발전 할 것이라는 예측할 수 있습니다.
(1) "와서"대규모 플러스 카지노 제어
미래에 플러스 카지노의 자율적 능력이 계속 향상됨에 따라 주요 의사 결정 지점에서만 인간의 개입이 필요하며 플러스 카지노 운영자가 제어하는 플러스 카지노의 수는 크게 증가 할 것입니다. 또한, 인간 컴퓨터 상호 작용의 수단이 점점 더 풍부해질 것이며, 플러스 카지노의 제어 효율은 본질적으로 개선 될 것입니다. 유인 항공기는 일반적인 지침을 통해 다양한 모델과 유형의 플러스 카지노을 제어하며, 플러스 카지노의 기술 시스템 및 통신은 유인/플러스 카지노 협업 전투 시스템에서 완벽한 진입 및 전투 플랫폼의 출발을 실현할 수 있습니다.
(2) 지능형 인텔리전스 처리
다른 플랫폼과 다른 센서에 의해 수집 된 데이터의 경우 대상이보다 지능적인 수단을 통해 정확하게 감지, 식별 및 추적되며 통합 된 상황 정보를 생성하기 위해 통합됩니다.
(3) 더 빠르고 저렴한 비용 시스템 기능 통합
개방형 시스템 아키텍처의 포괄적 인 채택, 유인/무인 항공기 협업 전투 기능 및 장비 조달 비용의 통합주기를 단축 시키며 동시에 유인/무인 항공기의 공동 전투는 무인 차량, 무인 선박 및 미지의 보트와 조화를 이루기 위해 빠르게 확장되어 A Compermation System Compability를 형성합니다.
결론
이 기사는 최근 몇 년 동안 유인/플러스 카지노 협업 분야에서 미군의 프로젝트를 깊이 분석하고, 유인/플러스 카지노 협력에 의해 개발되어야하는 주요 기술을 제안하고, 전형적인 전투 시나리오와 유인/플러스 카지노 공동 작업 작업의 전투 프로세스를 연구합니다. 마지막으로, 유인/플러스 카지노 협업 운영 분야에서 유인/플러스 카지노 협업 운영의 미래 개발을 예측하고 네트워크 정보 시스템과의 관계를 분석합니다.
【참조】
[1] 미국 국방부. 무인 시스템 통합 로드맵 FY2017-2042. 보고서, 2018.
[2] Li Lei, Wang Tong, Jiang Qi. 미국 코드 프로젝트는 분산 협력 운영 개발을 촉진합니다 [J]. 무인 시스템 기술, 2018, (3) : 63-70.
[3] Shen Chao, Li Lei, Wu Yang 등 American Air Manned/무인 자율 공동 협력 전투 기능 개발에 관한 연구 [J]. 전술 미사일 기술, 2018, (1) : 22-27.
[4] STANAG 4586 ED.3 2012 년 11 월 3 일, UAV 제어 시스템의 표준 인터페이스 (NATO UAV 상호 운용성을위한 UCS, NATO 표준화 기관 (NSA), 2012.
[5] Mário Monteiro Marques, Stanag 4586 - NATO UAV 상호 운용성을위한 UAV 제어 시스템 (UCS)의 스탠드 인터페이스.
[6] Yang Fan, Dong Zhenghong. 유인/무인 플랫폼의 공동 기술 및 행동 모델 [J]. 국방 기술, 2018, 39 (4) : 57-62.
[7] Sun Xiaowen. 무인/유인 및 로봇 공동 작업 탐지/전투 [J]의 적용에 관한 연구. 중국 전자 과학 아카데미 저널, 2014, 9 (4) : 5-8.